
-
首页
-
产品中心
物联感知产品
物联网行业产品
物联通信产品
商用产品
云端产品
-
解决方案
组网解决方案
平台解决方案
低速无人驾驶
行业资讯
- · 「视觉原生」破局:视启未来的隐空间世界模型,与物理世界AI的OS野心
- · 自动驾驶下半场:无人物流一场押注生态的“生死赌局”
- · 空港“无人之境”:2025年中国机场无人驾驶落地纪实
- · 智能汽车第三轮竞赛:AI 编程决定下一代定义权
- · 智能传感领域博士李文荣获加拿大院士称号
- · 为自动驾驶注入中国基因:全球首个中国城市场景资源包上线CARLA
- · 无人配送进入‘系统对抗’深水区:三巨头疯狂卡位供应链、产能与运营
- · 斑陌易行硅谷发布三大核心技术及T6无人配送机器人,开启“真端到端”商用新时代
- · 低速无人驾驶赛道迎规模化亮眼成绩单:多家企业无人车部署突破千台
- · 小鹏与华为的智驾差距:激光雷达不是关键,15万人的“全民数据大赛”才是真正难复刻的护城河
技术应用
- · 一文读懂自动驾驶数据闭环:从概念到实践
- · 智慧公交与自动泊车——“人-车-路-云”深度协同的出行新范式
- · 封闭与半封闭园区自动化——从厂区物流到无人矿卡的车路云实践
- · 从PTP到gPTP:时间同步技术进化,为无人驾驶安全驶入“纳秒时代”铺路
- · 高速公路与城市物流——超视距感知如何重塑货运安全与效率
- · 全息路口与智慧信号控制——路侧感知如何让红绿灯“会思考”
- · 连接真实世界与模型能力的自动驾驶持续进化机制
- · 无人驾驶挺进矿山:在“无路”之地,开出安全与效率
- · 无人配送车核心技术体系深度解析:从感知到能源的全链路技术突破
- · AGV自主移动机器人:在“最不设限”的厂区里,如何搬出最稳的货?
-
四信云
-
关于我们
关于四信
企业动态
商务合作
联系我们
-
技术支持





























无人配送车核心技术体系深度解析:从感知到能源的全链路技术突破
解决方案
解决方案
-
组网解决方案
-
5G+行业应用
-
工业物联网
-
智慧交通
-
智慧城市
-
新零售
-
智慧农业
-
智慧电力
-
安防监控
-
智慧环保
-
智慧水务
-
能源行业
-
智慧医疗
-
商业与金融
-
-
平台解决方案
-
供暖行业
-
智慧环保
-
-
低速无人驾驶
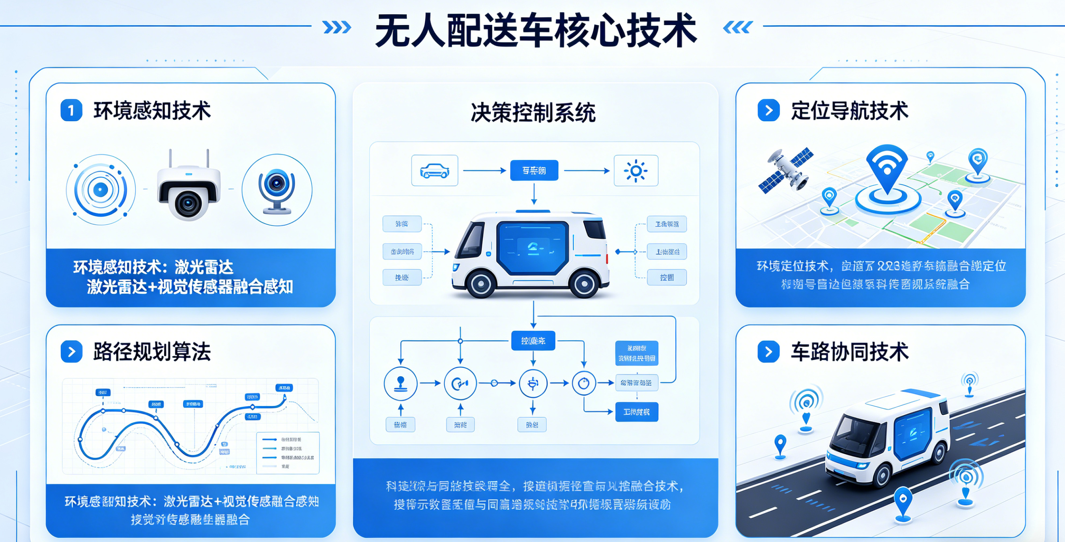
无人配送车是低速无人驾驶最具规模化落地潜力的应用场景之一。其技术成熟度直接决定了城市即时物流、园区封闭配送等业务能否从“试点示范”走向“商业盈利”。一套完整的无人配送车技术体系,涵盖环境感知与定位、决策与规划、线控执行、云端调度、能源管理五大核心模块,它们分别对应着车辆的“观察能力”、“思考能力”、“操作能力”、“协同能力”和“续航能力”。
本文从技术原理、关键难点与行业实践三个维度,对这五大模块进行精细化拆解,为相关从业者提供技术参考。
一、感知与定位:复杂动态环境下的环境认知
感知与定位系统是无人配送车实现自主运行的第一步。其任务包括:环境感知(识别障碍物、交通参与者、道路设施)和运动感知(确定自身位置、速度与姿态)。在城区开放道路场景中,车辆面对的是高度动态、非结构化的环境,感知系统的鲁棒性要求远高于港口、矿区等封闭场景。
1.1 核心技术原理:多传感器融合
单一传感器存在固有缺陷,行业普遍采用多传感器融合方案,通过异构传感器的信息互补构建可靠的环境模型。常用传感器及其作用如下:
- 激光雷达:提供稠密3D点云,对路缘、台阶、低矮障碍物的几何结构测量精度可达厘米级,是占据网格和障碍物检测的核心。
- 摄像头:捕获纹理、颜色与语义信息,用于交通信号灯、车道线、行人姿态识别,是视觉语义理解的基础。
- 毫米波雷达:受雨雪雾影响较小,可直接测量目标相对速度与距离,并能区分实体障碍物(如车辆、护栏)与非实体物体(如塑料袋、水雾)。
- 超声波雷达:短距探测精度高、波束角宽,用于近身盲区监测与自动泊车。
- GNSS/IMU组合导航:通过卫星定位与惯性导航融合,在高楼遮挡、隧道等GNSS信号退化场景下仍能输出连续位姿。
多传感器融合并非简单叠加,而是通过数据级融合(原始点云/图像拼接)、特征级融合(如BEV特征对齐)和决策级融合(多检测结果投票)三个层级,实现全面、准确的环境感知,在单一传感器失效时仍能维持基本功能。
1.2 核心难点:长尾场景与定位连续性
- 长尾场景覆盖:城市道路存在大量非标准化情况(临时施工、行人横穿、非机动车逆行)。这些“边缘案例”在训练集中占比极低,却是安全事故的高发诱因。
- 定位连续性不足:城市峡谷、隧道、林荫道等场景易造成GNSS信号失锁,纯IMU推算会出现累积漂移(误差 ≈ 初始误差 + 漂移率×时间)。需要多源融合将定位误差控制在0.5m以内。
- 极端环境可靠性:传感器须在-30℃~60℃温度范围、暴雨、大雪、强光照条件下稳定工作。摄像头需解决起雾与脏污问题,激光雷达需应对点云遮挡与反射率差异。
1.3 行业实践:从“高精地图依赖”向“无图/轻地图”演进
早期方案依赖预采集的高精地图匹配定位,精度虽高,但存在制图成本高、更新周期长、跨区域泛化能力弱等问题。当前趋势是通过提升车端实时感知与建图能力,降低对预存地图的依赖。
- 新石器X3 Plus:采用BEV-Fusion多模态融合感知方案,硬件配置从“2激光+11摄像头”调整为“12摄像头+1激光”,感知范围达360°×120m。基于Transformer架构的EV(第一视角感知)算法,使车辆具备实时环境建模与定位能力,部署效率提升80%以上。
- 佑驾创新小竹:采用全车规级方案,配备3激光+11摄像头+16超声波,构建五维安全冗余。关键传感器在风雨、振动、高低温冲击下的MTBF(平均无故障时间)≥10000小时。
二、决策与规划:毫秒级最优解求解
决策规划系统相当于无人配送车的“任务控制单元”,负责融合感知结果,生成行为指令(加速、转向、制动、停车)与行驶路径。其响应速度与动作合理性直接决定车辆安全性与运营效率。
2.1 技术原理:行为决策与路径规划
系统分为两个层次:
- 行为决策:基于环境感知与意图预测,在毫秒级完成判断。例如,针对横穿行人进行“紧急制动”、在无保护路口执行“停车让行”、在拥堵路段选择“绕行”。其核心是建立交通参与者多模态意图预测模型,预测未来1~3秒的轨迹并分配概率。
- 路径规划:在行为决策基础上,结合车辆动力学约束(最大转向角、最大加速度)和交通规则,生成几何可行且最优的行驶轨迹。典型算法包括A*、Dijkstra和RRT(快速探索随机树) – 后者因其高效搜索与动态避障能力,在城市非结构化道路中应用较多。
决策规划系统需要强大的计算平台和低延迟通信。计算平台完成多源数据处理与算法推理;5G通信模块保证车端与云端指令交互的端到端延迟≤20ms。
2.2 核心难点:不确定性与实时权衡
- 参与者意图不确定:行人和非机动车行为随机性强,系统需建立意图概率模型,避免基于单一假设的误判。
- 毫秒级多目标优化:须在100ms内完成环境解析、行为决策、路径生成,在安全与效率之间寻找最优平衡点。本质是高维状态空间下的实时优化控制。
- 长尾场景泛化:算法须对未见过的非常规场景(积水、临时围挡等)具备一定泛化能力,这依赖于大规模数据训练与强化学习。
2.3 行业实践:工控机向车规级域控制器迁移
决策规划的物理载体主要有工控机(IPC)和自动驾驶域控制器,两者差异显著:
|
指标 |
工控机(IPC) |
域控制器 |
|
定位 |
通用型工业计算平台 |
自动驾驶专用 |
|
算力 |
范围宽、可扩展GPU |
车规级SoC,针对性优化 |
|
可靠性 |
工业级 |
车规级(ISO 26262) |
|
成本 |
初期低,定制化成本高 |
研发高,量产均摊后低 |
|
迭代 |
软硬件耦合紧,升级慢 |
解耦架构,支持OTA |
随着规模化商业落地,车规级域控制器逐渐成为主流。天准星智TADC系列覆盖100~2000TOPS算力,基于英伟达Orin、地平线J6等芯片平台,支持CNN、端到端、VLA等多种模型,主流算法可在1个月内完成跨平台迁移部署。其中TADC-J6M(地平线J6M)算力12TOPS,支持7V BEV纯视觉方案;TADC-Orin系列(200/254TOPS)适配视觉+激光雷达融合的轻量级智驾系统。
三、线控执行:指令到动作的精准转化
线控执行系统是无人配送车的执行层,负责将决策规划模块的数字指令实时转换为转向、驱动、制动等物理动作。与传统燃油车的机械或液压连接不同,线控系统以电信号为传输介质,具有响应快、精度高、便于集成控制的优点。
3.1 技术原理:线控底盘四大子系统
- 线控制动:主流方案为EHB(电子液压制动)One Box,集成制动主缸、液压单元与电控单元,制动响应≤150ms,制动力精度±1%。新一代EMB(电子机械制动)完全取消液压管路,响应更快,已进入量产导入阶段。
- 线控转向:取消机械转向柱,通过电机驱动转向机构。转向比可动态调节(低速大转向比、高速小转向比),L4级无人配送车正向全向转向发展,实现原地零半径转向及横向移动。
- 线控驱动:基于电机驱动,分为集中式驱动(单电机驱动差速器)与分布式驱动(轮边/轮毂电机)。分布式驱动可独立控制各轮扭矩与转速,提供更高的操控性与冗余度。
- 线控悬架(非刚需):通过电机或液压主动调节刚度和车身高度,适配不同路面,主要应用于高端车型。
系统的核心性能指标包括:转向响应≤200ms,制动响应≤150ms,驱动扭矩控制精度±2%。
3.2 核心难点:功能安全与精度控制
- 车规级功能安全:须满足ISO 26262 ASIL等级要求,实现单点故障容错。例如,线控制动需配备主备双回路,主回路失效时备回路在100ms内接管。
- 高精度轨迹跟踪:执行系统存在机械延迟与惯性,需采用前馈+反馈+协同控制算法进行补偿,要求轨迹跟踪误差≤0.3m。
- 高可靠性与耐久性:无人配送车需7×24h高频运行,线控系统须承受频繁载荷变化及宽温、振动、粉尘环境,MTBF≥20000小时。
3.3 行业实践:自动轮智行底盘
传统线控底盘存在零部件多、灵活性差、重量大等问题。麦迪克智行的“自动轮”角模块构型,将驱动、制动、转向、悬架高度集成于单个车轮模块,实现三大突破:
- 降本减重:零部件数量减少约40%,整车减重超30%,能耗降低约40%。
- 高机动性:每个车轮独立大角度转向与驱动,支持横向移动、原地零半径掉头、斜向行驶,场景适应性提升90%。
- 天然冗余:分布式控制架构下单轮模块失效不会导致整车失控。
其WR2底盘质量700kg,满载1500kg,综合峰值扭矩1120N·m;旋风底盘系列覆盖1~3T载重,轮边电机峰值扭矩300~1100N·m,已在无人配送、无人清扫等场景落地。
四、云端调度:规模化运营的全局协同
当无人配送车从单点运营走向规模化集群部署时,云端调度系统成为决定整体运营效率的核心。它从全局视角对多车、多订单、多资源进行动态协同优化,实现“系统级最优”而非单车局部最优。
4.1 技术原理:全息感知与运筹优化
- 全局信息感知:实时采集所有车辆的位置、电量、载重、状态,以及订单信息、路网流量、充电站状态等,构建数字孪生模型。
- 动态任务分配:基于遗传算法、粒子群算法等运筹优化方法,综合车辆位置、时效、路况等因素,实现订单与车辆的最优匹配。
- 动态路径规划:结合全局路网流量,对车端规划路径进行实时调整,避免局部拥堵;对集群路径进行协同优化,防止多车区域聚集。
- 集群协同调度:在仓库出口、充电站、狭窄路段等资源受限区域,实现多辆车有序通行和错峰作业。
关键性能指标:调度响应时间≤500ms,任务匹配效率≥95%,较人工规划路径优化率≥20%。
4.2 核心难点:大规模算力与不确定性
- 超大规模计算:当车队规模达万台级,调度系统需实时处理数十万个动态变量(车辆位姿、订单、路况等),求解多约束多目标优化问题要求分布式算力架构和边缘计算卸载。
- 系统状态不确定性:路网流量、订单到达、装卸时间均具随机性,调度算法需具备鲁棒容错能力,能快速响应环境变化并重新生成近似最优解。
- 车-路-场-云协同:要求端云数据交互丢包率≤0.1%,控制接口统一,实现状态理解与指令执行的一致性。
4.3 行业实践:智能运维平台与车路云一体化
- 佑驾创新小竹平台:基于5G低延迟通信,支持高峰期串点配送与多车联动。提供7×24小时运维监控,多级应急机制,实现车辆全程可视可控。
- 天翼交通车路云一体化方案:依托中国电信云网融合优势,构建“路侧感知+云端决策+车端执行”架构。路侧设备提供超视距全局交通信息;云端进行全局调度与路径优化;车端执行指令。搭载“云端虚拟驾校+车端VLA司机”,在数字孪生环境中训练调度算法,技术迭代速度提升4倍。
五、能源管理:从续航保障到系统级能效优化
随着电动化与低碳化发展,能源管理已从单一的“续航维持”演变为集能量存储、补给网络、智能调度于一体的系统级技术,其目标是在满足车辆续航需求的前提下,实现运营成本最小、碳排放最低、调度效率最高。
5.1 技术原理:三大部分协同
- 能量存储:以锂电池为主。磷酸铁锂(能量密度180~200Wh/kg,循环寿命3000~5000次,安全性高)与三元锂(280~300Wh/kg,~2000次,成本中等)。无人配送车更侧重安全与全生命周期成本,磷酸铁锂是当前主流。固态电池(360~500+Wh/kg)处于研发验证阶段。
- 能源补给:插电充电(基础设施广但补能时间长)、氢燃料补能(时间短但设施不成熟)、甲醇补能(适用于基础设施薄弱区域)。
- 能源调度:基于“车-能-路-网”实时数据,通过算法实现智能补能调度,如谷时充电、峰时放电,订单低谷时调度补能,避免高峰缺电。
5.2 核心难点:物理瓶颈与补能生态柔性不足
- 电池技术瓶颈:磷酸铁锂能量密度已近理论极限(~200Wh/kg),三元锂~300Wh/kg;快充与循环寿命存在固有矛盾,大倍率快充可使循环寿命下降30%~50%。
- 补给生态刚性:固定充电桩布局与车辆动态运营需求脱节,运营半径受限于桩位分布,难以实现订单密度驱动的弹性调度。
- 多约束联合优化难度高:需同时整合车辆运行、订单、路况、电价等多源数据,求解高维优化问题,算法复杂度高。
5.3 行业实践:多元动力与移动储能
- 电氢智运多元动力方案:构建纯电、氢燃料电池、甲醇三种动力体系,适配不同场景。其V5H自动驾驶物流机器人(10吨载重)氢能增程版续航翻倍,可在-30℃极寒下稳定运行,已应用于工厂与物流园区的24h不间断作业。
- 新工绿氢移动储充机器人:L4级自动驾驶储充机器人,容量60~310KWh,支持60~120kW快充,将静态充电桩转变为动态补能节点。其中V3Pro(310KWh)为全球电量最大的储充机器人。已在江苏高速服务区、四川景区落地,单台日均充电量超300kWh,实现“能量上门”。同时支持峰谷套利(降低用电成本30%以上)和应急保电功能。
六、技术发展趋势
基于当前技术成熟度与商业需求,无人配送车核心技术的演进呈现四大方向:
- 感知无图化:降低甚至摆脱对高精地图的依赖,通过车端实时感知与建图能力提升系统泛化性,加速海外部署并降低综合成本。
- 全产业链车规级:从传感器、域控制器到底盘执行器,全面满足车规级可靠性、耐久性及功能安全标准,规模化量产将进一步压低硬件成本。
- 系统级协同:从单车智能向“车-路-云-网-图”一体化演进,五大核心技术模块不再独立优化,而是通过端到端协同实现全局能效最优。
- 硬件轻量化:传感器配置从“堆叠全量”转向“精准有效”,底盘向模块化、集成化发展,以更低功耗和物料成本支撑商业闭环。
无人配送车的技术体系已从各模块分立演进为环环相扣的全链路突破。感知、决策、执行、调度、能源五大核心能力的深度协同,正推动“最后一公里”的物流革命从概念走向规模化盈利的现实。
更多详情案例,请联系我们的专家团队
厦门四信通信科技有限公司(版权所有)闽ICP备08106834号-1 ©2008-2026  闽公网安备
35021102001059号
闽公网安备
35021102001059号
关注我们











